News
Accurate movements can mean the difference between sinking or swimming. Fortunately, the brain learns them well. Photo courtesy of SPH-SYOGOC/Selwyn Yeo.
Cambridge, Mass. – June 23, 2011 – Albert Einstein defined insanity as "doing the same thing over and over again and expecting different results." Practicing the same task repetitively, though, tends to be the default procedure when trying to learn a new motor skill.
A study led by Maurice Smith and colleagues at the Harvard School of Engineering and Applied Sciences (SEAS) suggests that simple task repetition may not be the most efficient way for the brain to learn a new move.
Their results, published in PLoS Computational Biology, demonstrate "motion-referenced learning." In essence, when people make an imperfect movement during practice, their brains learn less about what they plan to do than about what they actually do.
With that in mind, the researchers propose a new approach to neurological rehabilitation: one that continually adjusts the goals of practice movements so that systematic differences (errors) between these movements and the intended motion can be reduced.
In order to perform any movement accurately—whether that means reaching for a glass of juice without knocking it over, or swimming across a pool without sinking—the brain has to learn exactly which muscles to activate, and in what manner.
The muscle activation required for a given movement depends on the environment. For example, producing a swimming motion on the pool deck is not the same as doing it in the water, and picking up a glass of juice requires a different motion when your arm is weighed down by a heavy bag.
"Individuals learn to accommodate varying physical dynamics, making errors when encountering new situations, but quickly improving with practice. The brain builds internal models of these dynamics, producing patterns of muscle activation that account for external conditions," explains Smith, an Assistant Professor of Biomedical Engineering at SEAS.
Yet, for people who have suffered neurological damage, such as victims of stroke, the simplest of actions can be difficult to relearn.
The researchers recreated the learning process in healthy subjects by simulating a new physical environment, with unfamiliar forces.
The test subjects were asked to make reaching movements while holding the handle of a robotic arm so that a dot on an LCD screen moved toward a target. At the same time, the robot pushed the handle off course with a varying but predictable amount of force that depended on the hand's velocity.

Lead author Nicolas Gonzalez Castro demonstrates the use of the robotic arm to measure motor learning.
One experiment provided evidence of motion-referenced learning, and a second investigated whether an understanding of this mechanism could be used to improve the rate of learning.
“We designed a training procedure specifically tailored to this aspect of motor learning,” says lead author Nicolas Gonzalez Castro, a graduate student in Smith’s Neuromotor Control Lab.
“For a simple reaching task, we found that when we adjusted the target position from one trial to the next, so that adaptations could build up around the intended movement, our subjects learned 50 percent faster than when they just practiced the intended movement."
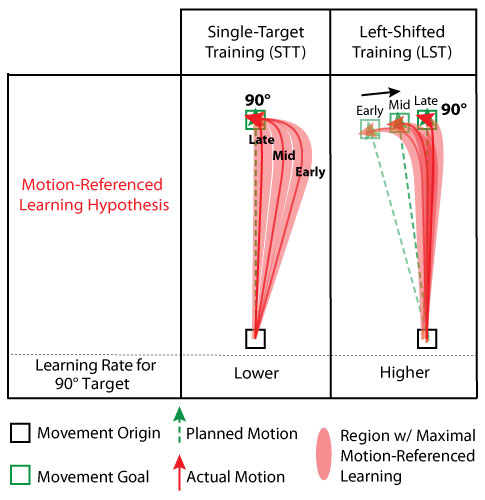
The brain learns associations most efficiently when it is repeating the same actual movement, not the same plan. In the Harvard experiments, the robot pushed the subject's hand to the right. The most efficient way for a subject to learn to hit a target that was directly ahead, then, was to begin with a target that was off to the left (Left-Shifted Training, LST), and in subsequent trials move that target slightly to the right.
The findings reveal that the brain is "wired" to maximize stability, a concept that has been essential in the development of algorithms for machine learning, but perhaps underplayed in scientists' previous understanding of human learning.
"Motion-referenced learning is required for stability when we learn about the physical dynamics of an environment, because the forces imposed by physical dynamics always depend on the actual motion experienced," explains Smith.
As algorithms for machine learning already incorporate motion-referenced learning (for example, when training a mechanical arm to grasp an object), Smith’s research suggests that scientists may have been better at teaching robots than at teaching humans.
“If you’re intending to teach a person something, there’s an implicit assumption that in the process of practicing what you’re trying to teach them, they’re learning what you want them to learn,” says Smith.
In reality, he says, rehabilitation might be more efficient if the assigned tasks were modified to take advantage of the mechanisms by which the nervous system actually forms associations.
As learning a complex task like walking is much more complicated than moving a handle to a target, adapting the rehabilitation plan for such a task will not be easy.
The findings, however, advance scientists' understanding of human motor learning at a fundamental level.
“There’s a lot of talk about biologically inspired engineering and how understanding biology helps you engineer things better, but of course there are also a huge number of things that aren’t well understood in biology,” says Smith.
“Sometimes fundamental principles like the need for stability, which is of the utmost importance to us as engineers, and the properties of the learning rules engineers have designed to ensure stability, are things that we take into our study of biological systems.”
Smith and Gonzalez Castro's co-author, Craig Bryant Monsen '08, assisted with the research in Smith's lab as an undergraduate.
The work was supported by a McKnight Scholar Award from the McKnight Endowment for Neuroscience, a Sloan Research Fellowship from the Alfred P. Sloan Foundation, and an Early Career Award in Biomedical Engineering from the Wallace H. Coulter Foundation to Maurice Smith.
Topics: Bioengineering
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Maurice Smith
Gordon McKay Professor of Bioengineering
Press Contact
Caroline Perry