News
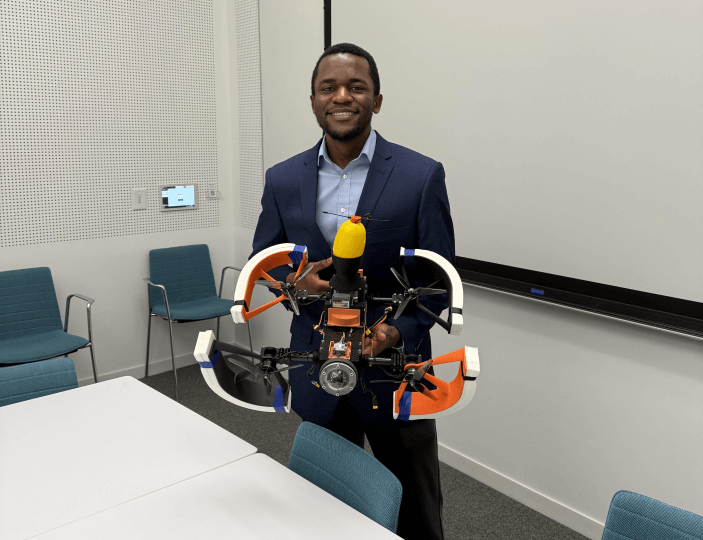
For his senior capstone project, Michael Awah designed a tethered hybrid vehicle capable of both aerial and underwater travel.
Engineering Design Projects (ES 100), the capstone course at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), challenges seniors to engineer a creative solution to a real-world problem.
Design and Control of a Hybrid Aerial and Underwater Vehicle with a Dynamic Tether
Micheal Awah, S.B. ‘25, Mechanical Engineering
Advisors: Rob Wood and Daniel Vogt
• Please give a brief summary of your project.
This project focuses on the development of a hybrid vehicle capable of both aerial flight and underwater travel. The vehicle employs a unique configuration, where the propeller arms can tilt for precise underwater control. One novel aspect of the system is the integration of a dynamic tether for communication. Since wireless signals do not transmit effectively underwater, the vehicle maintains a connection to the surface via a motorized buoy and tether, which ensures continuous communication with the operator. The tether length is automatically adjusted in real-time based on tension sensing, allowing the buoy to remain at the surface while the vehicle maneuvers below.
• How did you come up with this idea for your final project?
I have been volunteering as an undergraduate researcher at the Harvard Microrobotics Lab, where I got to learn about Project CETI (Cetacean Translation Initiative), a global research effort focused on understanding and interpreting the communication of sperm whales. CETI is actively developing tools for noninvasive data collection, including audio, telemetry, and physiological data from tagged whales. However, underwater video imaging remains a critical missing data stream in their work. This inspired the concept of an aerial vehicle that could quickly deploy from a boat or land and transition into underwater operation to capture images and data without the complexity of traditional underwater deployment infrastructure.
•What was the timeline of your project?
I decided on this project along with my advisor in May 2024. The project was completed over the course of a six-month period from September 2024 to March 2025. In the first half, I focused on researching aerial-aquatic platforms, designing and fabricating the vehicle hardware, modeling the system dynamics for both air and underwater environments, and developing the flight control software. In the second half, I concentrated on system integration and testing. This included waterproofing the electronics, characterizing propeller performance in water, developing the dynamic tether retraction system, and finally, testing the full air-to-water transition and underwater maneuvering capabilities of the vehicle.
• What part of the project proved the most challenging?
The most challenging part of the project was managing the multidisciplinary design constraints. The vehicle had to function in both air and water – environments that require conflicting control strategies. For instance, in air, the system must generate upward lift, while underwater, it needs to generate downward force for submersion. Designing a configuration that could handle both while maintaining sufficient degrees of freedom for control was complex. Additionally, building a custom flight control stack that supports both modes, and implementing waterproofing all introduced unique technical hurdles.
• What part of the project did you enjoy the most?
The most rewarding part was seeing the vehicle perform underwater. Watching it pitch its propellers downward to dive while translating smoothly was incredibly satisfying, especially after all the theoretical work and simulations. I also really enjoyed testing the dynamic tether system and seeing it respond intelligently to vehicle movement in order to keep the buoy at the surface.
• What did you learn, or what skills did you gain, through this project?
This project taught me a great deal about full-stack robotic system development – from mechanical design and electronics integration to software development and dynamic modeling. I learned how to mathematically model complex, hybrid systems, develop custom embedded software, and integrate sensors, actuators, and communication modules into a cohesive platform. It also deepened my skills in controls, waterproofing techniques, system testing, and troubleshooting in real-world conditions.
Topics: Academics, Materials Science & Mechanical Engineering
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Press Contact
Matt Goisman | mgoisman@g.harvard.edu