News

A soft robot developed by researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) could pave the way to fully untethered robots for space exploration, search and rescue systems, biomimetics, medical surgery, rehabilitation and more.
This new, simplified soft robot, powered by pressurized air, replaces multiple control systems with one input, reducing the number, weight and complexity of the components needed to power the device.
“Before this research, we couldn't build fluidic soft robots without independently controlling each actuator through separate input lines and pressure supplies and a complex actuation process,” said Nikolaos Vasios, a graduate student at SEAS and first author of the paper. “Now, we can embed the functionality of fluidic soft robots in their design, allowing for a substantial simplification in their actuation.”
The research was published in Soft Robotics.
To simplify the soft robots, the researchers harnessed the viscosity of fluid, which is a measure for the resistance of a fluid moving through an object. Imagine water moving through a straw — the thinner the straw, the more difficult it is for water to pass through. Using this principle, the researchers, led by Katia Bertoldi, the William and Ami Kuan Danoff Professor of Applied Mechanics at SEAS, carefully selected tubes of different sizes to control how quickly air moves through the device. A single input pumps the same amount of air through one of the tubes, but the size of the tubes determines how and where the air flows.
The team developed a framework that automatically determines how a soft robot should be made, how the tubes should be selected and how it should be actuated in order to achieve a target function, such as crawling or walking, with a single input line.
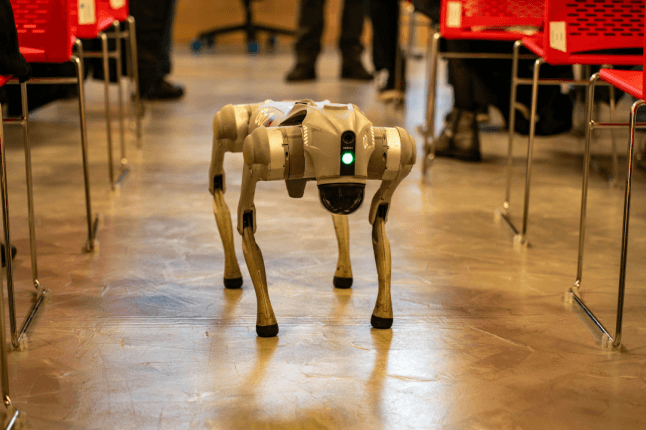
They demonstrated the approach on a four-legged, soft robot. The tubes, embedded in the top of the robot, directed the air to each leg in sequence, enabling the robot to crawl.
“Our work presents for the first time a strategy that can be used to make simply actuated fluidic soft robots, based on this well-known phenomenon of viscous flow,” said Bertoldi, who is also an Associate Faculty at the Wyss Institute at Harvard University. “With the strategy presented in our work, the actuation of fluidic soft robots will now be simpler and easier than ever, taking a major step towards fully untethered and simply actuated soft robots.”
The Harvard Office of Technology Development has protected the intellectual property relating to this project and is exploring commercialization opportunities.
The research was co-authored by Andrew J. Gross, Scott Soifer and Johannes T.B. Overvelde. It was supported by the National Science Foundation.
Topics: Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Katia Bertoldi
William and Ami Kuan Danoff Professor of Applied Mechanics
Press Contact
Leah Burrows | 617-496-1351 | lburrows@seas.harvard.edu