News
Key takeaways
- SEAS researchers have built a robotic platform inspired by California blackworms, where individual robots tangle together into large, active blobs.
- An internal air chamber pressurizes each robot “worm” to make it curl up. Multiple robots curl around each other and entangle.
- The researchers aim to study dynamics of entangled group behaviors and design robots that can join together to cross gaps or climb walls.
The slimy, segmented, bottom-dwelling California blackworm is about as unappealing as it gets – but get a few dozen or thousand together, and they form a massive, entangled blob that seems to take on a life of its own.
It may be the stuff of nightmares, but it is also the inspiration for a new kind of robot. “We look at the biological system, and we say, ‘Look how cool this is,’” said Senior Research Fellow Justin Werfel, who heads the Designing Emergence Laboratory at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS). Werfel is hooked on creating a robotic platform that’s inspired by a wriggling ball of blackworms and that, like the worms, can accomplish more as a group than as individuals.
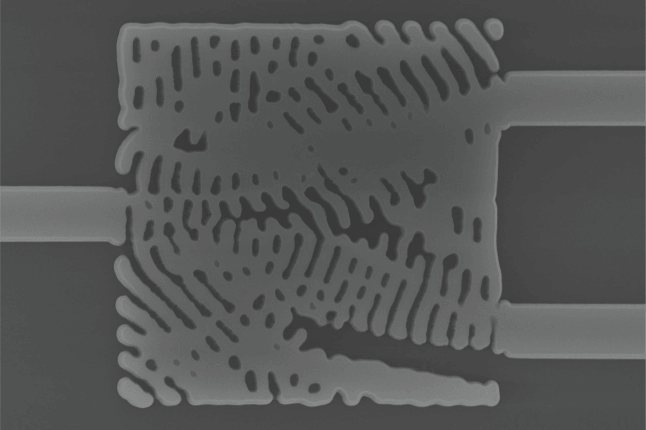
Recently garnering a Best Paper on Mechanisms and Design award at the IEEE International Conference on Robotics and Automation, the Harvard team’s blackworm-inspired robotic platform consists of soft, thin, worm-like threads made out of synthetic polymer materials that can quickly tangle together and untangle.
Each robot is about a foot long and individually powered; when an internal air chamber is pressurized, the robot “worm” curls up, and when multiple robots curl near each other, they tangle into a blob. As with the living worms, the resulting mass of entangled bots can move around as a cohesive unit, operating on both land and in water.
The long-term goals of the project are to study the dynamics of group behaviors that emerge from physical entanglement, and to endow those capabilities onto artificial systems that could, for example, explore large spaces, cross gaps, move objects, climb up buildings, and more.
“Is the physical entanglement not just the means of cohesion, but also a channel for communication and coordination?” Werfel said. “Here’s a platform that we can use to study those kinds of things.”

Justin Werfel with a handheld demo version of the blackworm-inspired robotic platform. Credit: Eliza Grinnell/SEAS Communications
The team also hopes to develop an untethered version that uses microfluidics to guide its actions. Eventually, blobs of many independent robots will move through natural environments with full autonomy.
The paper’s first author was former visiting master’s student Carina Kaeser, and co-authors included Junghan Kwon, Elio Challita, Harry Tuazon, Harvard SEAS Professor Robert J. Wood, and Professor Saad Bhamla of Georgia Institute of Technology. The research received federal support from the National Science Foundation and National Institutes of Health.
Topics: Materials Science & Mechanical Engineering, Research, Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Justin Werfel
Associate in Materials Science and Mechanical Engineering
Press Contact
Anne J. Manning | amanning@seas.harvard.edu