News
Key Takeaways
-
Harvard SEAS and MIT researchers developed kirigami-inspired shoe grips that pop up like snake scales to increase traction and reduce fall risk, particularly for older adults.
-
The thin steel metasurfaces deploy spikes when the shoe bends during walking, then retract for a smooth surface, outperforming commercial crampons in friction tests.
-
Beyond fall prevention, the technology could improve mobility for all-terrain robots in search and rescue or other challenging environments, with commercialization opportunities underway.
You’ve never seen a pair of snake skin shoes like this before.
Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and MIT have developed pop-up shoe grips, inspired by snake skin, that can increase friction between the shoe and the ground. The assistive grips could be used, among other things, to reduce the risk of falling among older adults.
The research is published in Nature Biomedical Engineering.
“Falls are the leading cause of the death for older adults and the second leading cause of occupational-related deaths,” said Giovanni Traverso, an assistant professor of Mechanical Engineering at MIT and co-corresponding author of the paper. “If we could control and increase the friction between us and the ground, we could reduce the risk of these types of falls, which not only cost lives but billions of dollars in medical bills every year.”
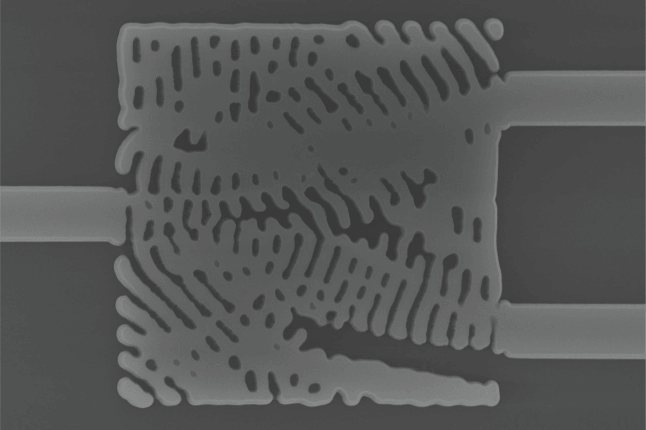
The researchers used kirigami — the Japanese art of paper cutting — to mimic snake scales. The gripper is made from a thin, flexible steel sheet, with dozens of scale-like cuts. When the material stretches, the cuts pop out into spikes that dig into the ground and create friction. When the foot flattens, the spikes fold back into the material, creating a smooth surface again.
“As you walk, the curvature of your shoe changes,” said Sahab Babaee, a research scientist at MIT and co-lead author of the paper. “We designed these assistive grippers to pop-out when weight shifts from the heel to the toe and the shoe bends and stretches along the soles.”
The multidisciplinary research team studied gaits to find the exact right curvature of the foot to trigger the spikes and tested the device on multiple surfaces, including ice.
“Through a combination of simulations and experiments, we carefully choose where to make the cuts so that the spikes are stiff and pop out at the best possible angle of attack to maximize the grip of the kirigami with the contacting surface,” said Ahmad Rafsanjani, a former postdoctoral fellow at SEAS and co-lead author of the paper. Rafsanjani is currently a senior scientist at ETH Zurich.
In tests, the device not only weighed less and was easier to take on and off than leading commercial crampons, but it also outperformed them in creating friction.
“These lightweight, kirigami metasurfaces could play an important role in public health to mitigate slipping and falling in a range of different environments,” said Katia Bertoldi, the William and Ami Kuan Danoff professor of Applied Mechanics at SEAS and co-corresponding author of the paper. “They could also be used to improve the mobility of all-terrain robots that could one day travel across difficult environments for search and rescue missions.”
Harvard’s Office of Technology Development and MIT’s Technology Licensing Office have each protected related intellectual property and are seeking commercialization opportunities.
The research was co-authored by Simo Pajovic and Yichao Shi. It was supported by a startup grant from the Department of Mechanical Engineering at MIT, the National Science Foundation under awards DMR-1420570 (Materials Research Science and Engineering Center) and the Swiss National Science Foundation
Kirigami-inspired research developments
Follow the evolution of kirigami-inspired research at Harvard SEAS at this link.
Topics: Health / Medicine, Kirigami, Materials, Materials Science & Mechanical Engineering, Research, Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Katia Bertoldi
William and Ami Kuan Danoff Professor of Applied Mechanics
Press Contact
Leah Burrows | 617-496-1351 | lburrows@seas.harvard.edu