News
Coordinated behaviors like swarming – from ant colonies to schools of fish – are found everywhere in nature. Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have given a nod to nature with a next-generation robot system that’s capable of movement, exploration, transport and cooperation.
A study in Science Advances describing the new soft robotic system was co-led by L. Mahadevan, the Lola England de Valpine Professor of Applied Mathematics, Physics, and Organismic and Evolutionary Biology in SEAS and the Faculty of Arts and Sciences, in collaboration with Professor Ho-Young Kim at Seoul National University. Their work paves new directions for future, low-power swarm robotics.
The new robots, called link-bots, are composed of centimeter-scale, 3D-printed particles strung into V-shaped chains via notched links and are capable of coordinated, life-like movements without any embedded power or control systems. Each particle’s legs are tilted to allow the bot to self-propel when placed on a uniformly vibrating surface.
The chain-linked bots are inspired by ant colonies or groups of cells that exhibit what physicists call “emergent collective behavior” despite being composed of simple individual units. This is in contrast with traditional swarm robots, such as those made from drones or small individual robots, which typically rely on energy-intensive components like sensors, wireless communications, or control algorithms.
“From a physical and computational perspective, the interactions between link-bots are really simple, even though they display what look like very complex behaviors,” Mahadevan said. “With a large number of these agents, you get a range of emergent behaviors.”
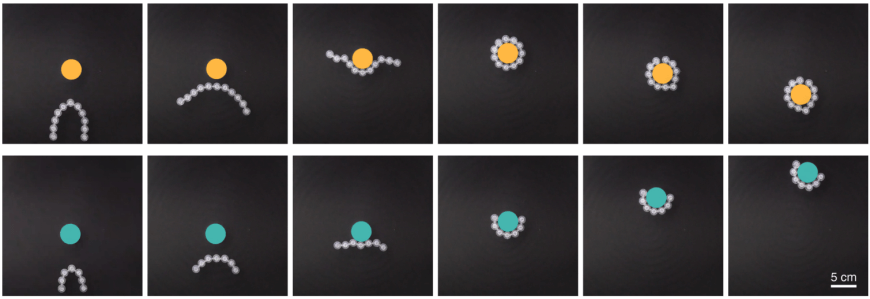
Link-bots exhibit collective behavior and can perform a variety of tasks, including transport of objects.
The team demonstrated that link-bots can collectively move forward, stop, and change direction at a wall, simply by modifying their link structures. They can squeeze through gaps, block openings, and surround and carry objects. Multiple link-bots can coordinate to accomplish tasks too difficult for a single robot, such as traversing an obstacle.
To understand the behaviors, SEAS postdoctoral fellow Kimberly Bowal developed a computational model that simulates how different link designs and particle counts affect movement. The model helped the team gain understanding of parameters that were hard to probe experimentally, and to predict new behaviors.
“It has been exciting to show that physical linking constraints alone can drive programmable, environment-responsive collective behaviors,” Bowal said. “I am especially excited about this design paradigm in which robotic function and intelligence emerge from collective geometry and interaction, rather than centralized control or complex individuals.”
Mahadevan, who has long been fascinated with the natural world, said the principles the team demonstrates with their link-bots could someday enable applications from sorting mechanisms to transport of passive objects. More broadly, he says, they could show how emergent functional behavior in collectives can arise without a plan or planner.
“In a way, this approach is the opposite of planned engineering,” he said. “With design, you tell this bot to do this or that, and you plan everything, and they go and do their job. But we say, it’s this self-organization and emergence that arises from simple interactions that’s so powerful, and likely relevant to how evolution works in biology.”
The paper was co-authored by Kyungmin Son and Kwanwoo Kim from Seoul National University’s Department of Mechanical Engineering.
Topics: Applied Mathematics, Applied Physics, Materials Science & Mechanical Engineering, Research, Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

L Mahadevan
Lola England de Valpine Professor of Applied Mathematics, of Organismic and Evolutionary Biology, and of Physics
Press Contact
Anne J. Manning | amanning@seas.harvard.edu