News
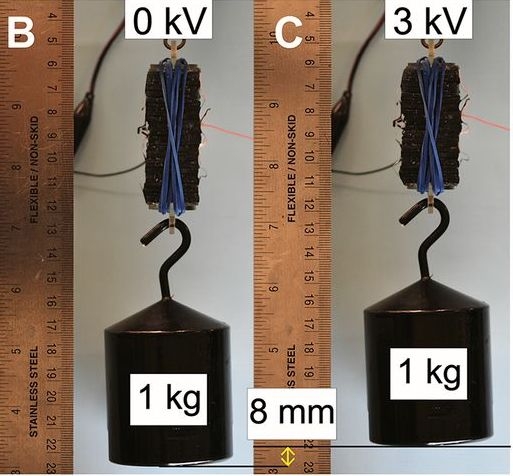
The artificial muscle can lift a 1-kg weight when an electric field is applied (Image courtesy of Havard SEAS)
When we think about fast robots, we tend to think of rigid, traditional robotics like those found in factory automation, or perhaps the recent parkour-like demonstrations of the Atlas robot — not soft, squishy devices like the Octobot.
Developing soft, artificial muscles that are also fast and strong is an important step in developing soft robots that can both safely interact with people and complete important tasks.
Now, a team of researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) has developed fully soft, electrically driven artificial muscles that operate on par with natural muscles.
The muscle is made using dielectric elastomers, soft materials with good insulating properties, that deform when an electric field is applied. By using a new combination of nanoscale conductive particles and many layers of thin soft elastomers, the researchers demonstrated that they could achieve contraction forces, motions, and operating frequencies on par with natural muscles.
This artificial muscle could be used for prosthetics, surgical robots, and wearable devices, as well as soft robots capable of locomotion and manipulation in natural or human-centric environments.
The research was published in the Proceedings of the National Academy of Science.
“Before this research, we didn't know the limits of performance of dielectric elastomer artificial muscles, meaning how much energy can we put in before they break down, and how much work we could get out,” said Mihai Duduta, Postdoctoral Fellow in Materials Science and Mechanical Engineering and first author of the study. “Now, we can make artificial muscles that are as strong and as fast as natural muscles, and can be driven directly by an electric signal rather than indirectly by a pump, as previous research has done for fluidically-driven artificial muscles.”
Next, the researchers aim to develop more conductive electrodes, and less viscoelastic elastomers to make the muscles even faster and stronger.
The research was co-authored by Robert Wood, the Charles River Professor of Engineering and Applied Sciences at SEAS, David Clarke, Extended Tarr Family Professor of Materials at SEAS, Ehsan Hajiesmaili and Huichan Zhao.
It was supported by the National Science Foundation Materials Research Science and Engineering Center Grant (MRSEC).
Topics: Robotics
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Robert J. Wood
Harry Lewis and Marlyn McGrath Professor of Engineering and Applied Sciences

David Clarke
Extended Tarr Family Professor of Materials
Press Contact
Leah Burrows | 617-496-1351 | lburrows@seas.harvard.edu


