News
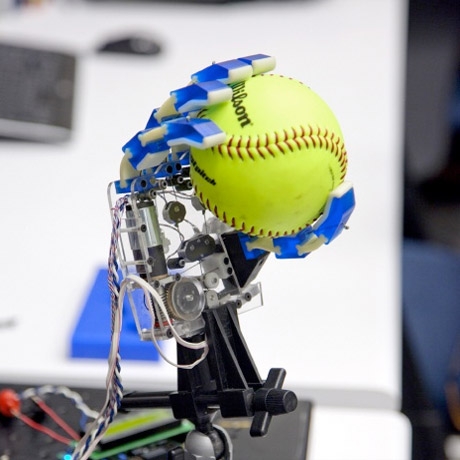
A flexible robotic hand developed by engineers at Yale and Harvard was inspired by another kind of appendage: a cockroach leg. (Photo by William Sacco, Yale University.)
In a makeover inspired by cockroach legs, the engineers chose not to make their robotic hand smarter, but to redesign its form to suit a dumb robot.
"People have been trying to build robotic hands for 20 or 30 years, but those hands have rarely been able to perform dexterous tasks," explained Robert D. Howe, who heads Harvard's BioRobotics Laboratory. Howe worked with Aaron Dollar, a former graduate student and now an assistant professor of engineering at Yale, to develop the new hand.
In the real world, Howe explained, both robots and humans have trouble estimating the relationship between their hand and the object they want to grasp. Humans compensate for errors by opening their hands and making their fingers soft and flexible, so they can glide along an object's edge before wrapping around it to pick it up.
"The traditional approach in robotics research is to deal with errors using elaborate sensors, motors, and controls," Howe explained. The resulting mechanical hands were very complex and expensive. They were also slow, since they required lots of computing power to perform even the simplest tasks.
Topics: Robotics, Bioengineering
Cutting-edge science delivered direct to your inbox.
Join the Harvard SEAS mailing list.
Scientist Profiles

Robert D. Howe
Abbott and James Lawrence Professor of Engineering


